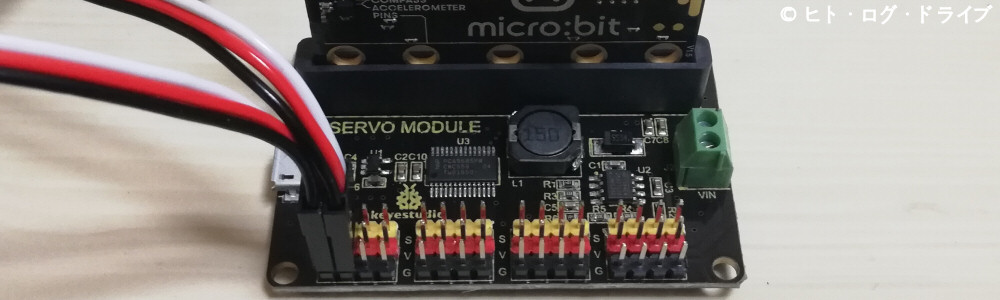
今回は前回記事で購入したサーボモーターを実際にmicro:bitに接続して動かしてみます。micro:bitはサーボモーターにもよりますが、直接端子(0~2、3V、GND)に接続するだけで動作させる事が可能です。従ってmicro:bitに搭載されているセンサーやLEDの機能だけでは満足出来なくなった場合、次のステップとしてサーボモーターの利用も手軽に行う事が出来ます。

今回は前回記事で購入したサーボモーターを実際にmicro:bitに接続して動かしてみます。micro:bitはサーボモーターにもよりますが、直接端子(0~2、3V、GND)に接続するだけで動作させる事が可能です。従ってmicro:bitに搭載されているセンサーやLEDの機能だけでは満足出来なくなった場合、次のステップとしてサーボモーターの利用も手軽に行う事が出来ます。

micro:bitとその他のパーツを購入してから1か月、何か動く物を作ってみたいと思い、サーボモーターを購入してみました。micro:bitでは本体のみでもサーボモーターを繋いで動かす事が可能ですが、micro:bit本体から供給できる電圧は3Vなので、ラジコンや模型用サーボモーターでもあまり大きな物は動かす事は出来ません。従って今回は5Vが出力出来るサーボモーター用のモジュールも合わせて購入しました。
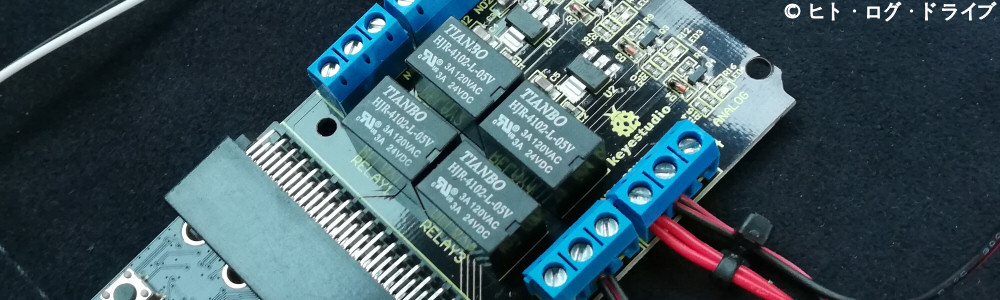
これまではmicro:bitに搭載された機能のみを試してきましたが、今回は別途購入した有接点リレーを搭載したブレイクアウトボードを併用して、車両のSIドライブのモード切替を行います。また無線機能を利用して操作と切替(リレー動作)を別々のmicro:bitで出来る様にしてみます。
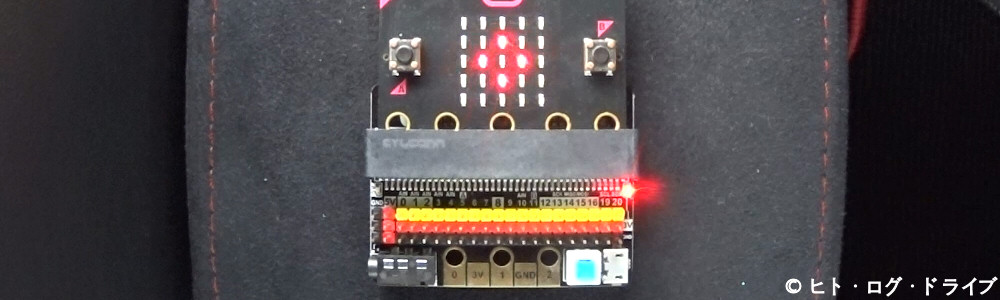
今回はmicro:bitに搭載されている加速度センサーを利用してみます。加速度センサーではmicro:bit本体を振ったり傾けた時、XYZ方向それぞれの移動速度の変化割合や傾いた角度の大きさを測る事が出来ます。Microsot MakeCodeでは既にmicro:bit本体を振ったり傾けたりといった条件のブロックが用意されているので、数値を意識せずに簡単に利用する事も可能です。

micro:bitでは搭載されている方位センサーから0~359度の範囲で数値を取得する事が可能で、Microsot MakeCodeにも「方角(°)」というブロックも既に用意されています。micro:bitの基本チュートリアルとしても既にありそうですが、方位センサーを利用して簡単に出来る事はコンパス(方位計)しか思い付かないので、今回はコンパスを作成してみます。
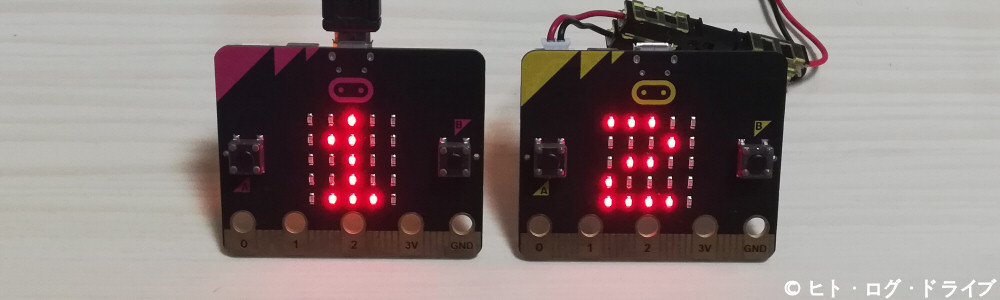
micro:bit本体には様々な機能が初めから搭載されていて、Microsot MakeCodeで用意されているブロックから簡単に利用する事が出来ます。私の場合は車内での使用を想定しながら、実験的にそれらの機能を1つ1つを試してみようと思っていますが、今回は最初に基本となりそうな無線機能を試します。