

WRX micro:bitを車両で使う その7 加速度センサーの利用
今回はmicro:bitに搭載されている加速度センサーを利用してみます。加速度センサーではmicro:bit本体を振ったり傾けた時、XYZ方向それぞれの移動速度の変化割合や傾いた角度の大きさを測る事が出来ます。Microsot MakeCodeでは既にmicro:bit本体を振ったり傾けたりといった条件のブロックが用意されているので、数値を意識せずに簡単に利用する事も可能です。
Microsot MakeCodeでのブロック
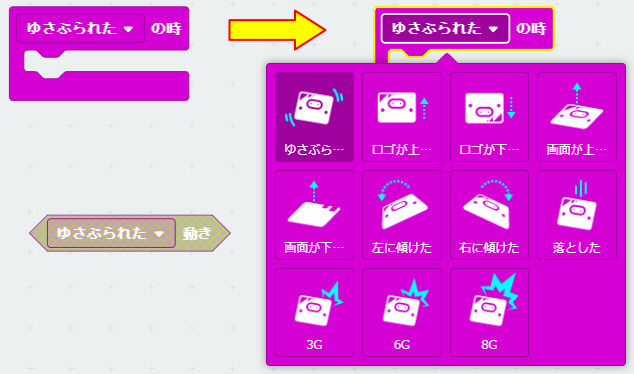
Microsot MakeCodeで用意されているブロックは基本のブロック(~の時)と、条件としてのブロック(動き)の2種類があります。これらのブロックでは「ゆさぶられた」の他にプルダウンメニューでmicro:bitの状態を選択する事が可能で、ABボタンを押す場合と同様の使い方が可能です。
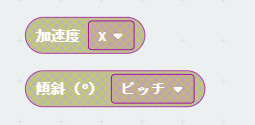
また数値として利用する場合は、加速度と傾斜の2種類があります。加速度はXYZ方向のいずれかを数値「-1023~1023」の範囲内で指定します。micro:bitが水平(LEDが上)かつ静止状態であればXYはそれぞれ「0」となります。揺らしたり傾けたりすると数値はその方向へ変化します。ただしZの場合はmicro:bitを立てると「0」、立てたまま前後方向に揺らしたり傾けたりすると数値が変化します。
傾斜はピッチとロールの2種類で、ピッチはmicro:bitを水平(LEDが上)に置いた状態から前後方向、ロールは左右方向の傾き角度です。それぞれmicro:bitを裏返すと「-180(°)」になります。
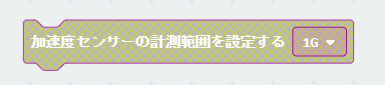
ちなみに、加速度センサーの計測範囲を1G・2G・4G・8Gと設定出来るブロックがあるのですが、私が試した限りではあまり数値変化の大きさに違いを感じません。何か勘違いをしている気もしますが。
水準器を作る
Microsot MakeCodeではチュートリアルとして加速度センサーを利用して、micro:bitを振ってLEDに1~6の数字を乱数で表示させるサイコロプログラムがありますが、これでは機能的にABボタンを押す事とあまり変わらないので、もう少し加速度センサーの特徴を利用した形のプログラムとして水準器を作ります。
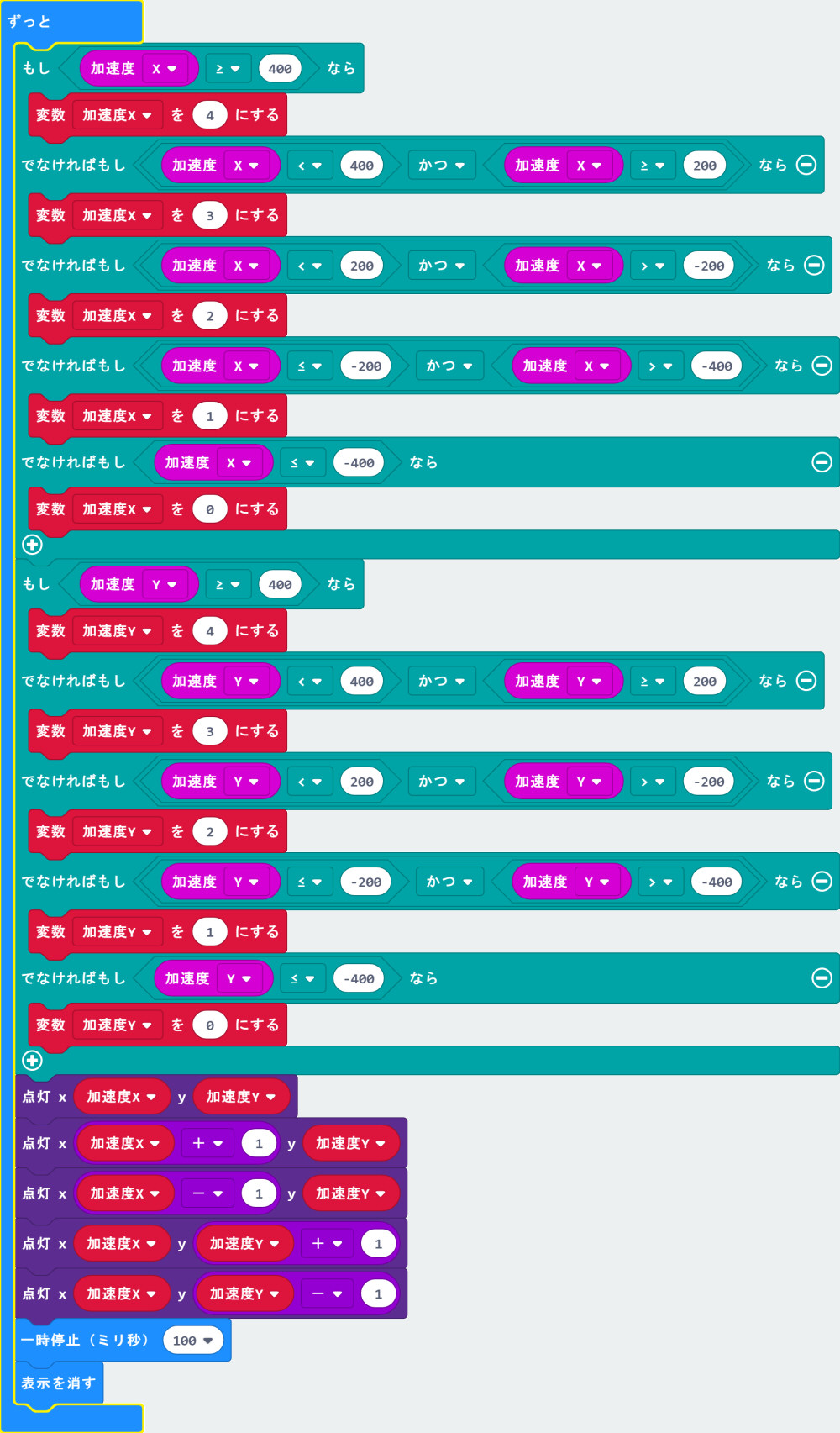
とりあえず簡単なXY方向の水準器です。micro:bitが水平(LEDが上)になっている時、LEDの中心位置に十字マークが表示されます。micro:bitを振ったり傾けるとその方向に十字マークが動きます。振りや傾きの大きさによって十字マークの移動量も変わりますが、LEDの数が少ないので中心から2段階しかありません。また感度は各範囲で指定している数値次第です。変数に0~4の数値を入力していますが、LEDに十字マークを表示する為です。
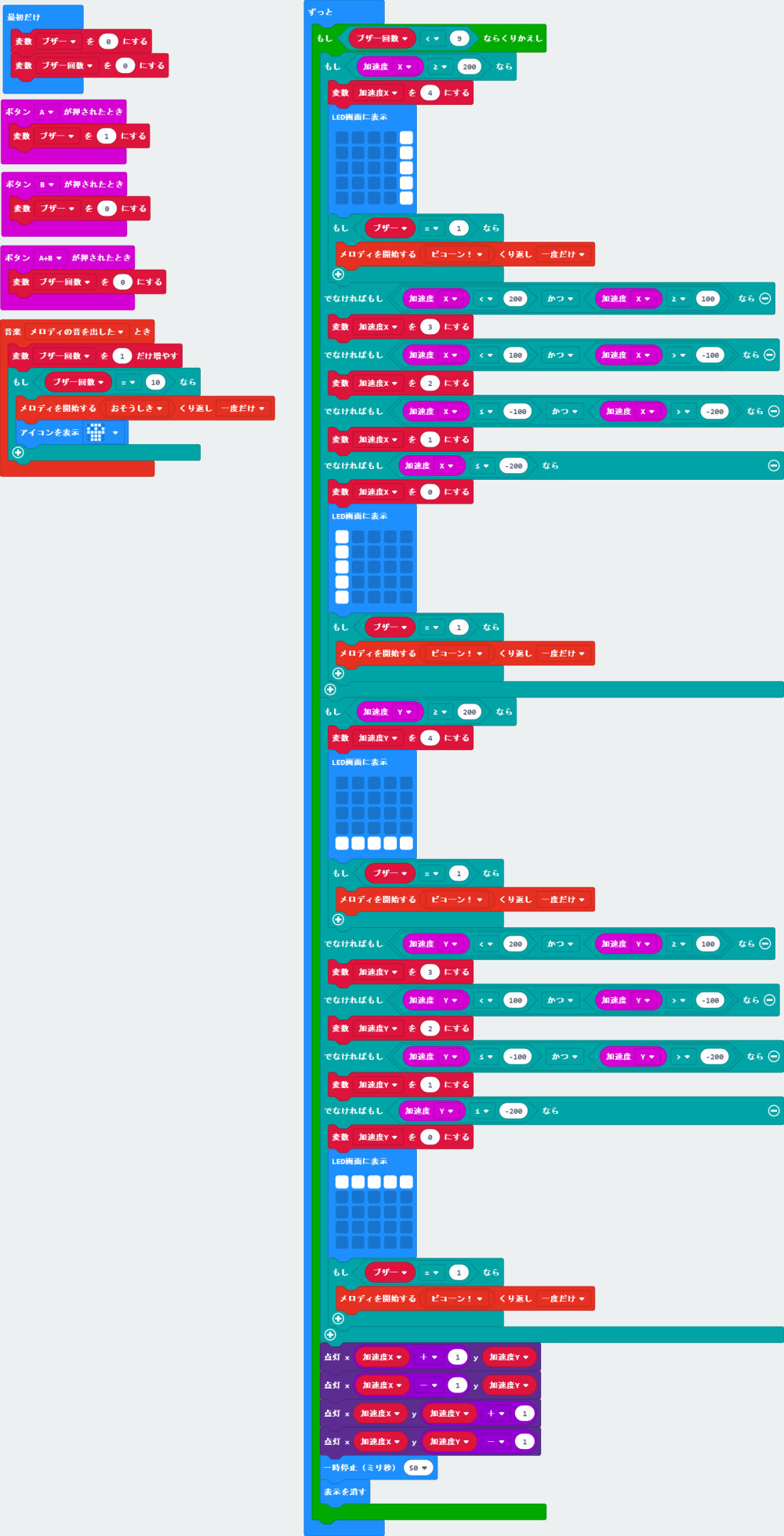
上記は少しゲーム性を持たせ、micro:bitを手に持って十字マークが動かない様に歩けるか?というプログラムです。最初の状態は単なる水準器ですが、加速度や傾きが一定以上を超えるとその越えた方向が分かる様になっています。Aボタンを押すと一定以上を越えた回数が10回になった時点でゲームオーバー、A+Bボタンで再開、Bボタンで終了(通常の水準器)です。ブザーがあれば音も出ます。
ただしLEDの表示に対してセンサー内部の数値が連続で一定以上を超える事(チャタリング)もあるので、LEDで越えた方向の表示が10回未満でもゲームオーバーになる事があります。また時々LEDが無表示になるバグもあります(A+Bボタンで復帰します)。
車内で使う
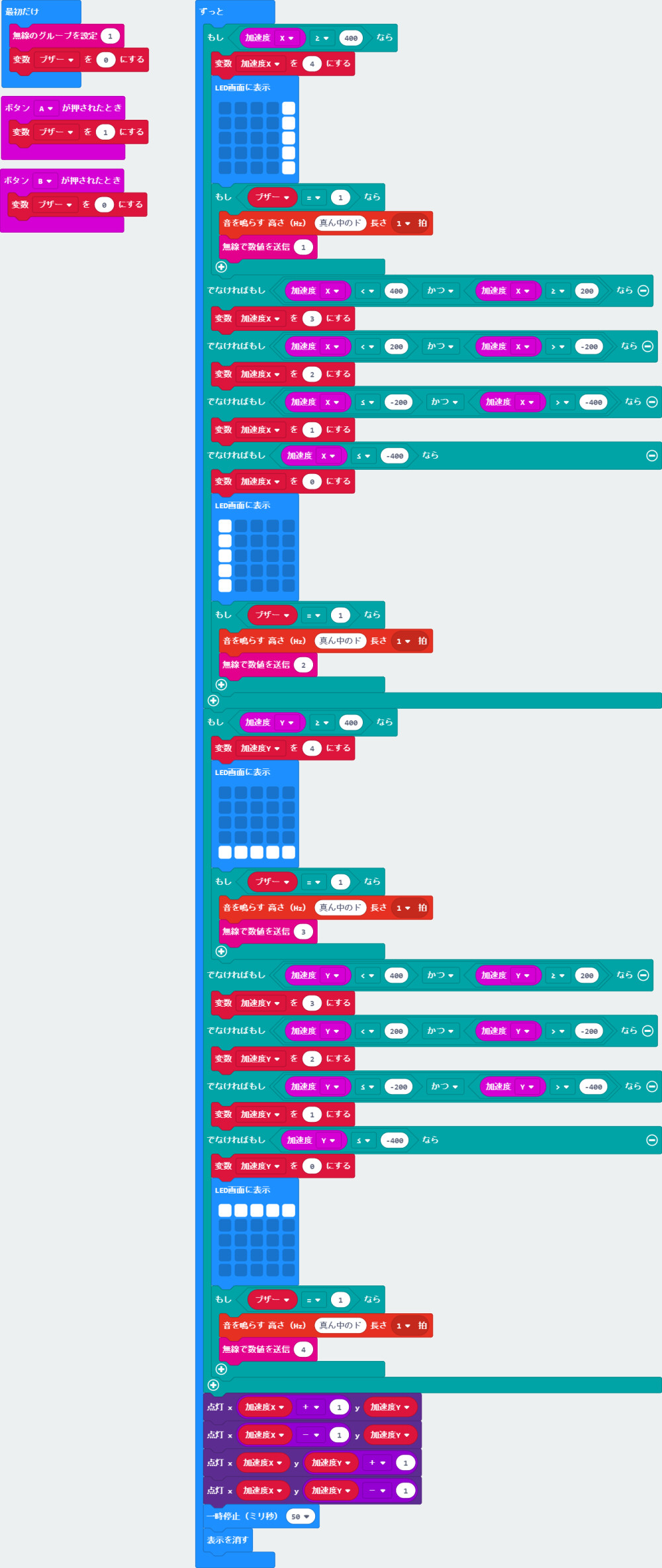
車内での利用を考えると上記のゲームとほぼ同じプログラムで、運転中の急加減速や急ハンドルの検出を行う事が出来ます。一定以上を超えた時のブザー音はAボタンで有効、Bボタンで無効に出来ます(初期は無効)。
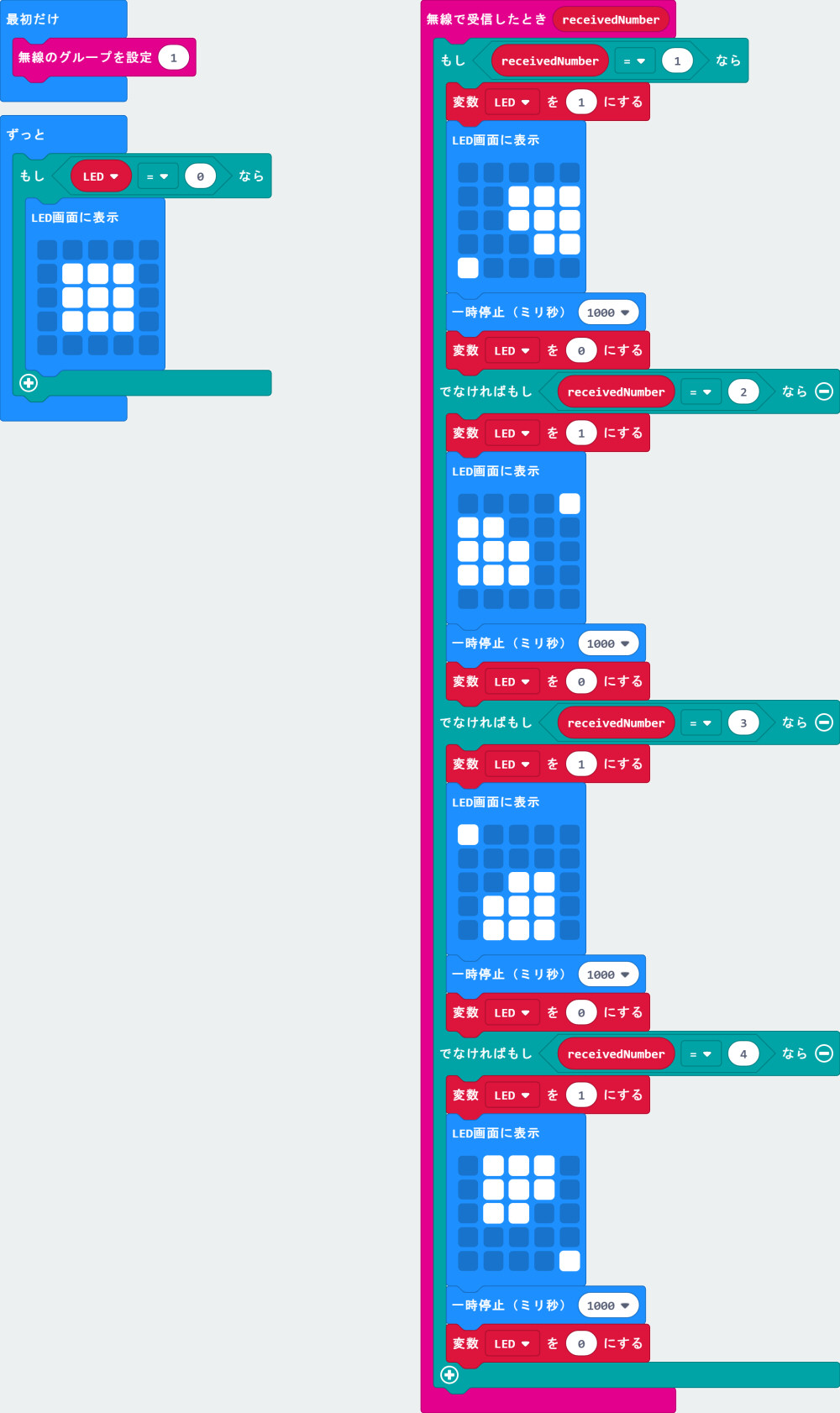
加速度センサーを利用する場合も前回の方位センサーと同様に、micro:bitを水平に設置しておく必要があります。従って加速度センサーの数値がオーバーした際の結果(どの方向にオーバーしたか)を、もう1台のmicro:bitに送信する機能も付けています(上記が受信側)。
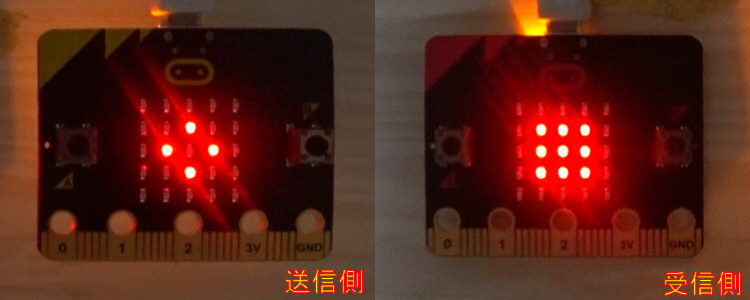
イメージは某アニメの豆腐です。通常はどちらもLEDの中心に表示があります。
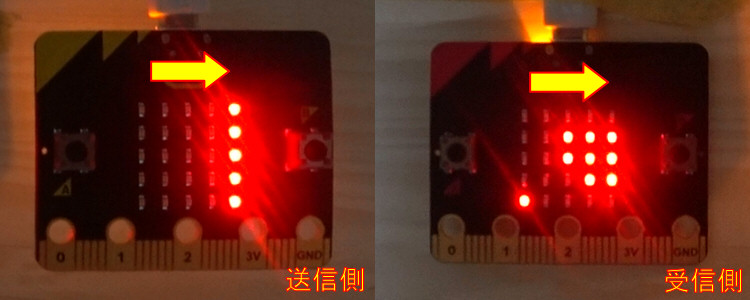
加速度を検出する(送信)側でオーバーした方向に、受信側の■が移動して少し欠けます。また今回はIOブレイクアウトボードを使用して、ボードに搭載されているブザーから音でも認識出来ます。
動画
上記は実際に試してみた様子です。当初、加速度の数値範囲が厳しすぎてブザーが鳴りっぱなしでした。最大300(-300)程度にするとだいぶ落ち着きますが、まだ路面の状態で過敏に反応してしまいます。先のプログラムでは最大400(-400)になっています。
micro:bit 新バージョン「2.0」について
2020年11月25日より、Micro:bit本体の新バージョン「2.0」が発売になっています。従ってこれまでの古いmicro:bitを使用した記事(~その24)と新しいmicro:bitでは記事内容に相違がある場合があります。ただしこれまでのプログラムは基本的には新しいmicro:bitでも動作し、古いmicro:bitも引き続き使用する事が可能です(ハード的に新たに追加された機能は、拡張ボード等が必要ですが)。
なお新しいmicro:bitについては実際に1つ購入し、micro:bit関連記事「その25」から扱っています。
2022年4月追記
2021年12月にmicro:bit本体のバージョンが「2.2」になるとのアナウンスがありましたが、「2.0」との機能上の違いは無いとされています。
「micro:bit」関連記事
以下は「micro:bit」タグの記事一覧です(投稿順)。現在の記事とこれ以降に投稿した記事も含みます。「その24」までの記事ではmicro:bit本体のバージョン「1.5」を使用しています。
クリックで開きます
- WRX micro:bitを車両で使う その1 micro:bitの購入
- WRX micro:bitを車両で使う その2 Microsot MakeCodeとスマホ用アプリ
- WRX micro:bitを車両で使う その3 micro:bitの仕様と購入したブレイクアウトボード
- WRX micro:bitを車両で使う その4 本体ファームウェアの更新とWebUSB
- WRX micro:bitを車両で使う その5 無線機能の利用
- WRX micro:bitを車両で使う その6 方位センサーの利用
- WRX micro:bitを車両で使う その7 加速度センサーの利用
- WRX micro:bitを車両で使う その8 micro:bitからSIドライブのモード切替
- WRX micro:bitを車両で使う その9 サーボモーターの利用(準備編)
- WRX micro:bitを車両で使う その10 サーボモーターの利用(動作編)
- WRX micro:bitを車両で使う その11 可動式雲台を作る(2軸編)
- WRX micro:bitを車両で使う その12 可動式雲台を作る(1軸編)
- WRX micro:bitを車両で使う その13 連続回転サーボモーターの利用
- WRX micro:bitを車両で使う その14 Bluetoothでスマホから操作(データ受信)を行う
- WRX micro:bitを車両で使う その15 LCDパネル(I2C LCD1602・2004)の利用
- WRX micro:bitを車両で使う その16 シリアル通信(RS232C)を行う
- WRX micro:bitを車両で使う その17 光センサーと温度センサーの利用
- WRX micro:bitを車両で使う その18 LEDのフォントとスクロールスピードを変える
- WRX micro:bitを車両で使う その19 ELM327の車両との通信を確認する
- WRX micro:bitを車両で使う その20 アスキーコード16進数から数値10進数への変換
- WRX micro:bitを車両で使う その21 車両からエンジン回転数を得る
- WRX micro:bitを車両で使う その22 7セグメントLEDの利用(TM1637ドライバ)
- WRX micro:bitを車両で使う その23 DCモーターを制御する(TB6612FNG・DRV8833)
- WRX micro:bitを車両で使う その24 ステッピングモーターを制御する(ULN2003ドライバ)
- WRX micro:bitを車両で使う その25 micro:bit バージョン2.0を購入(2021年12月 v2.2アナウンスあり)
- WRX micro:bitを車両で使う その26 バージョン2.0で追加されたMakeCodeブロック
- WRX micro:bitを車両で使う その27 バージョン2.0の初期状態と追加された機能
- WRX micro:bitを車両で使う その28 新バージョン(v2.0)のI2C通信
- WRX micro:bitを車両で使う その29 環境モニターを作る(気温・気圧・湿度編)
- WRX micro:bitを車両で使う その30 環境モニターを作る(二酸化炭素・有機化合物編)
- WRX micro:bitを車両で使う その31 環境モニターを作る(LCD表示・動作確認編)
- WRX micro:bitを車両で使う その32 環境モニターを作る(RTCモジュール追加編)
- WRX micro:bitを車両で使う その33 環境モニターを作る(ロギングモジュール追加編)
- WRX micro:bitを車両で使う その34 環境モニターを作る(ログデータ記録編)
- WRX micro:bitを車両で使う その35 車内のCO2濃度と換気について
- WRX micro:bitを車両で使う その36 新バージョン(v2.0)でのI2C通信の問題解決
- WRX micro:bitを車両で使う その37 Microsoft MakeCodeの新バージョン(v4)と新機能データロガー
- WRX micro:bitを車両で使う その38 mp3音声ファイルの再生(DFPlayer Mini)
- WRX micro:bitを車両で使う その39 車速パルス信号から速度を計算する
- WRX micro:bitを車両で使う その40 フルカラーLED(WS2812B)でメーターを作る
- WRX micro:bitを車両で使う その41 フルカラーLEDマトリックス(WS2812B)で時計を作る
- WRX micro:bitを車両で使う その42 フルカラーLEDマトリックス(WS2812B)でピクセルアートアニメーションを作る
「micro:bit+プラレール」も始めました。
その他
FA用PLCとELM327を使用した「OBD2」関連の記事は以下の記事から始まります。
注記
-
- このブログ内で書いている内容はあくまで私の利用する製品(アプリ含む)や機器での場合です。他メーカーの製品や機器をはじめ、同じメーカーの製品・機器であってもバージョン違い等の場合もあるので、記事内容の保証や責任を負う事は出来ません。
- 記事内で紹介している製品や、その他の類似製品を購入・利用する場合はそのメーカーや購入先で仕様等を確認し、自己判断と自己責任の下で利用して下さい。
- 記事内で公開しているmicro:bit用プログラムは自由に利用・改変して頂いて構いません。ただし不具合やバグもありますので、プログラムを利用した際の故障や事故等についての保証や責任を負う事は出来ません。自己判断と自己責任の下で利用して下さい。
- micro:bit製品やプログラミング、その他記事内容について個別の問合せや依頼を頂いても回答する事は出来ませんので、予め御了承下さい。
- BBC micro:bitは、micro:bit教育財団の登録商標です。その他のブランド名または製品名は各所有者の商標です。