
先日購入したZOOMのH2nを車内に持ち込み、車載動画で使用しているソニーのアクションカム「FDR-X3000」と合わせて使用してみました。今回の記事ではFDR-X3000の内蔵マイクを基本として、H2nの各録音モードで録音した音声との比較をしてみます。またいつもはFDR-X3000に外部マイクとしてaudiotechnicaの「AT9920」を接続して使用しているので、H2nにもAT9920を接続して違いを比較してみます。

先日購入したZOOMのH2nを車内に持ち込み、車載動画で使用しているソニーのアクションカム「FDR-X3000」と合わせて使用してみました。今回の記事ではFDR-X3000の内蔵マイクを基本として、H2nの各録音モードで録音した音声との比較をしてみます。またいつもはFDR-X3000に外部マイクとしてaudiotechnicaの「AT9920」を接続して使用しているので、H2nにもAT9920を接続して違いを比較してみます。

前回と前々回の記事で、ELM327を介してエンジン回転数を示す2バイトのデータが、micro:bitのバッファ内の定位置に入る事の確認と、アスキーコード16進数から数値10進数への変換プログラムの作成を行いました。今回はこれらを踏まえた上で実際にエンジン回転数を得られるプログラムを作成し、車両で試してみます。

前回はサーボモーターを2つ組み合わせて、上下左右に動く雲台を作りました。ただし車載動画での利用を考えると上下方向の動きは不要かと思います。今回はサーボモーターは1つにして左右のみの動きにし、micro:bitでの動作プログラムももう少しスムーズに動く様にしたいと思います。また実際に車内に設置して動画も撮影してみます。

micro:bitでのサーボモーターの利用方法が分かったので、今回は実際にサーボモーターを使った可動式の雲台(カメラマウント)を作ってみる事にしました。サーボモーターは2個購入しているのでこれを組み合わせ、上下左右へ動かせる様にします。
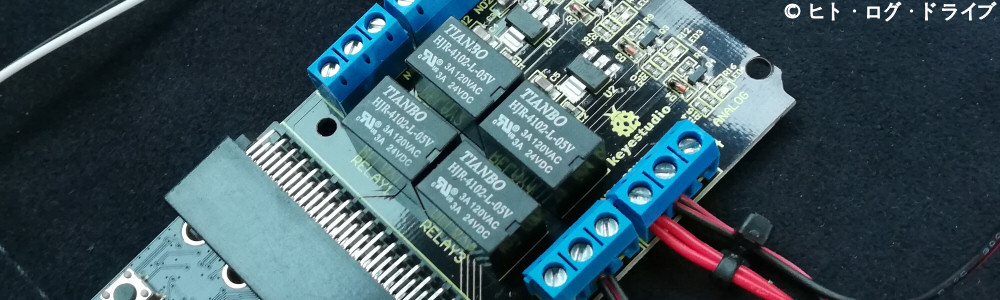
これまではmicro:bitに搭載された機能のみを試してきましたが、今回は別途購入した有接点リレーを搭載したブレイクアウトボードを併用して、車両のSIドライブのモード切替を行います。また無線機能を利用して操作と切替(リレー動作)を別々のmicro:bitで出来る様にしてみます。
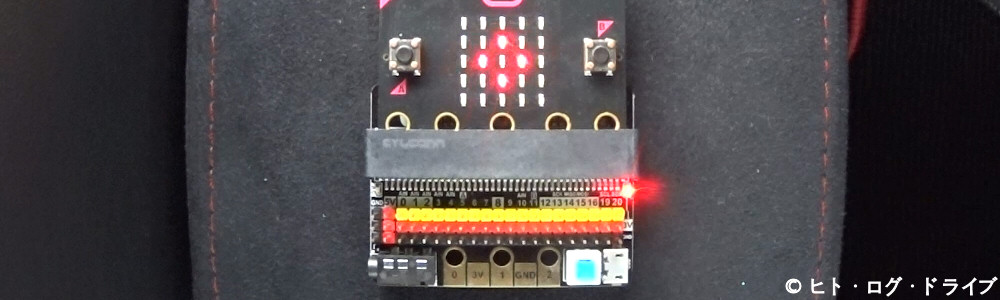
今回はmicro:bitに搭載されている加速度センサーを利用してみます。加速度センサーではmicro:bit本体を振ったり傾けた時、XYZ方向それぞれの移動速度の変化割合や傾いた角度の大きさを測る事が出来ます。Microsot MakeCodeでは既にmicro:bit本体を振ったり傾けたりといった条件のブロックが用意されているので、数値を意識せずに簡単に利用する事も可能です。